Strumenti chirurgici che si piegano da soli
I dispositivi devono essere piccoli per le operazioni minimamente invasive. I ricercatori dell'ETH hanno ora sviluppato un metodo per trasportare dispositivi di grandi dimensioni attraverso un catetere stretto. Questo amplia le possibilità di progettazione di dispositivi chirurgici minimamente invasivi.
Un cammello non può passare per la cruna di un ago. Ma le ricerche all'ETH di Zurigo hanno raggiunto un risultato che - metaforicamente parlando - ci si avvicina molto. Hanno sviluppato un nuovo approccio per dispositivi chirurgici minimamente invasivi, grazie al quale è possibile introdurre nel corpo oggetti di grandi dimensioni attraverso uno stretto catetere.
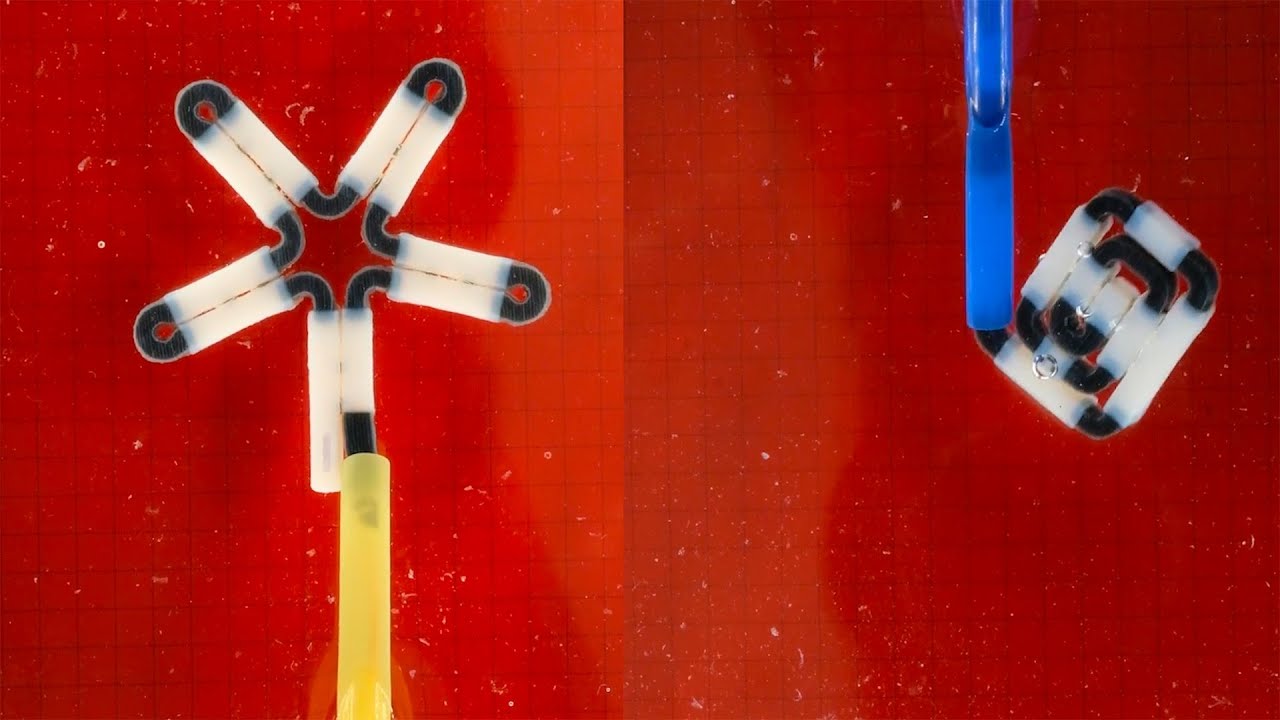
Ecco come funziona: I ricercatori smontano questi dispositivi in singole parti e poi le spingono attraverso il catetere come se fossero infilate in un filo di perle. Alla fine del catetere, le parti si assemblano in una forma predefinita grazie ai magneti incorporati.
La ricerca condotta dal team guidato dal dottorando Hongri Gu, ora postdoc presso l'Università di Costanza, si è concentrata principalmente sulla dimostrazione delle diverse possibilità del nuovo approccio. Gli scienziati hanno anche costruito un braccio di presa per endoscopio in modo relativamente semplice utilizzando la stampa 3D. Hanno inoltre dimostrato che è possibile assemblare una testa di endoscopio composta da tre parti utilizzando il nuovo approccio.
Per i prototipi del dispositivo, i ricercatori hanno combinato segmenti morbidi ed elastici con segmenti rigidi in cui sono incorporati i piccoli magneti. Questo design consente anche di eseguire movimenti con raggi e angoli molto stretti con la testa dell'endoscopio, cosa che non è possibile con gli endoscopi attuali. Questa maggiore manovrabilità amplia le possibilità di costruzione di dispositivi per la chirurgia mini-invasiva su organi come l'intestino o lo stomaco. Gli scienziati hanno pubblicato il loro studio dimostrativo nella rivista scientifica pagina esternaComunicazioni sulla natura.
Riferimento alla letteratura
Gu H, M?ckli M, Ehmke C, Kim M, Wieland M, Moser S, Bechinger C, Boehler Q, Nelson BJ: Catene robotiche morbide auto-pieganti con forme e funzionalità riconfigurabili. Nature Communications, 7 marzo 2023, doi: pagina esterna10.1038/s41467-023-36819-z